SimROBOT1はロボットを快適に扱う 『統合型ロボットソフトウェア』です。
3D表示でロボットを表示し直感的な操作で簡単にモーションが作成できます。
音声ナビ付きチュートリアルを基本機能として搭載しておりますので、簡単にソフトウェアの操作方法を習得する事が出来ます。
ロボット付属ソフトウェアには無い、歩巾設定機能や動画と同期する機能があります。
また、 SimROBOT1は作成したモーションのシミュレーションやロボットのバトル等の様々なロボットコンテンツが含まれています。
新しくロボットを始められる方はもちろん、従来ソフトウェアでは操作が難しいと感じておられる方にもお勧めのソフトウェアです。
SimROBOT1は、近藤科学株式会社製ロボットKHR-2HV専用の「SimROBOT1 for KHR-2HV」をリリースしております。
ロボットの動きを、3D表示で簡単に作れます。
画面のロボットをマウスで直感的に操作するだけでモーション作成・編集が簡単に行えます。
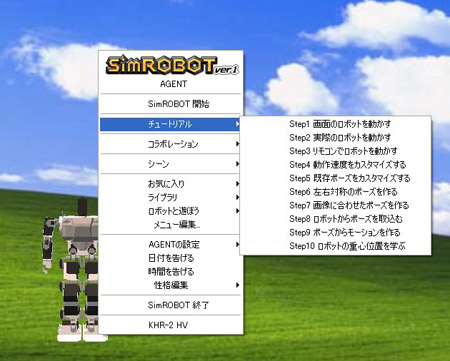
音声ナビ付きチュートリアルで、初心者でも簡単に操作できます。
初めての方でも戸惑うことなくモーション編集を習得できます。
具体的なポーズ・モーション作成の手順や、重心の概念を学ぶ事が出来ます。
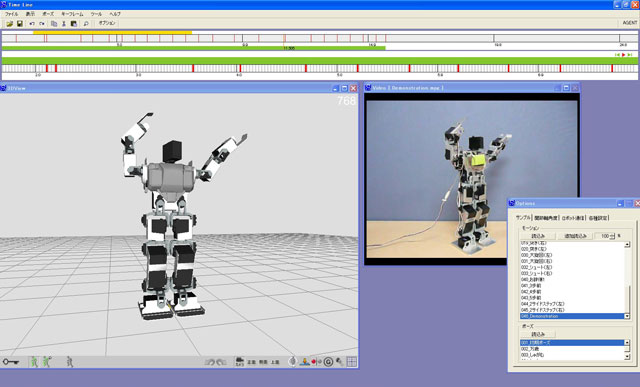
音楽、映像とロボットが動機
世界で初めて映像や音声ファイルをモーションと同期再生する『コラボレーション』機能を搭載しています。
映像を確認しながらフレームごとにモーション作成をすることができるので、作成することが難しいダンスやナレーションに合わせたデモ等を間単に作成できます。
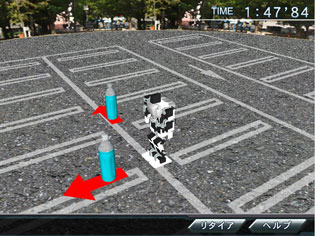
シーンによるシミュレーション機能
「格闘大会は興味があるが、敷居が高い。」と感じている方に朗報です。
ロボット格闘の、シミュレーションが行えます。実物のロボット2台が手元に無くても、格闘の技を磨けます。
格闘のシミュレーションには、プラクティスのシーンと、バトルのゲームがあります。ペットボトル蹴り、パンチボール、攻撃回避等の練習で、レベルアップが可能です。
実力がつくと、相手(実際の相手又は、コンピュータの相手)と戦い、段位向上することが出来ます。

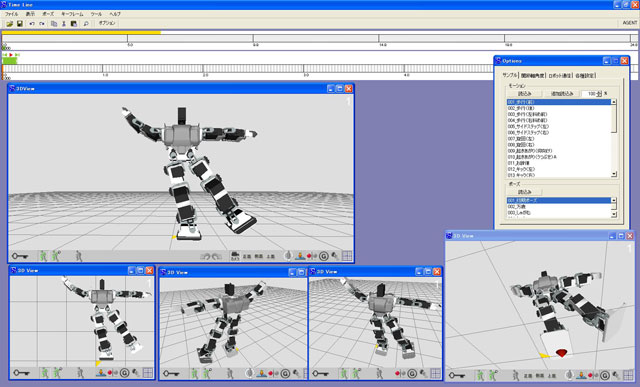
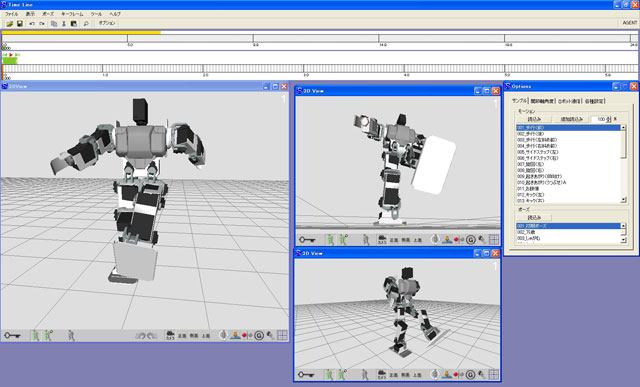
3D View
3D画面を同時に複数表示することで、ロボットのポーズや動きを様々な視点から同時に確認することができます。
視点の変更や拡大縮小も、マウス操作で自由に行えます。
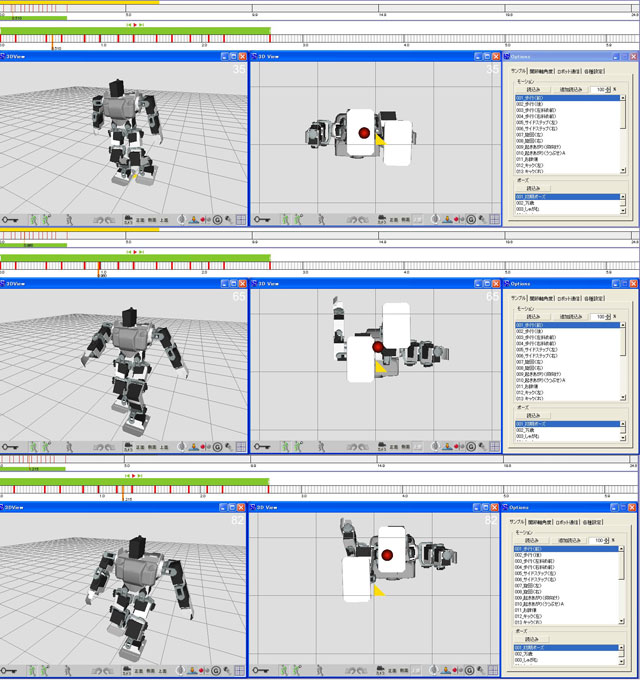
重心表示
フレームごとにロボットの重心の位置を表示します。
自分の作ったポーズだけでなく、そのポーズとポーズの間の動作中でもロボットが安定しているかどうかがひと目で判断できます。
歩巾設定
前進モーション等で歩幅を任意に設定する事ができます。
任意の場所への移動等が容易に行えるようになりました。
衝突検知機能
ロボットの部品がぶつかるようなポーズになると、ぶつかる部分の色が自動的に変わります。
さらに衝突するポーズを自動的に防止する「セーフティ」機能により、ロボットへの過剰な負荷を避けることができます。
| OS | Windows XP |
| CPU | Intel PentiumⅢ(R)プロセッサ(1Ghz以上) (※動画・ロボット通信同時使用時は「Intel Pentium4(R)プロセッサ2Ghz以上」を推奨) |
| グラフィックスボード | OpenGLグラフィックアクセラレータ DirectXグラフィックアクセラレータ V-RAM 64MB以上 |
| サウンドボード | DirectSound 対応のサウンドボード |
| ハードディスク空き容量 | 150MB(最低サイズ)、200MB以上(推奨サイズ) |
| RAM | 256MB以上 (※動画・ロボット通信同時使用時は「512MB以上」を推奨) |
| ディスプレイ解像度 | 1024 x 768 以上を推奨 |
| その他 | 2つ以上のUSBポート 2ボタンマウス (3ボタンホイールマウスを推奨) Windows Media Player (10以降) DirectX(9.0以降) |
| 推奨機器 | スピーカー(音声出力機器) |